This exploration started with a feeling...
What would it feel like to touch across space? To press your palm against a stranger’s palm in another part of the world. To push on their palm and feel their force as they push back. This exploration involved designing and creating two studies, one using hydraulics and the other a mechanical Arduino study.
While the speculative technology of touch across space has applications in many fields, I’d love to capture this feeling in a public sculpture. I imagine two connected columns in separate locations that evoke play, wonder, and connectedness. Creating moments between strangers across space, and the people experiencing the magic to the left and right of you.
Hydraulic Study
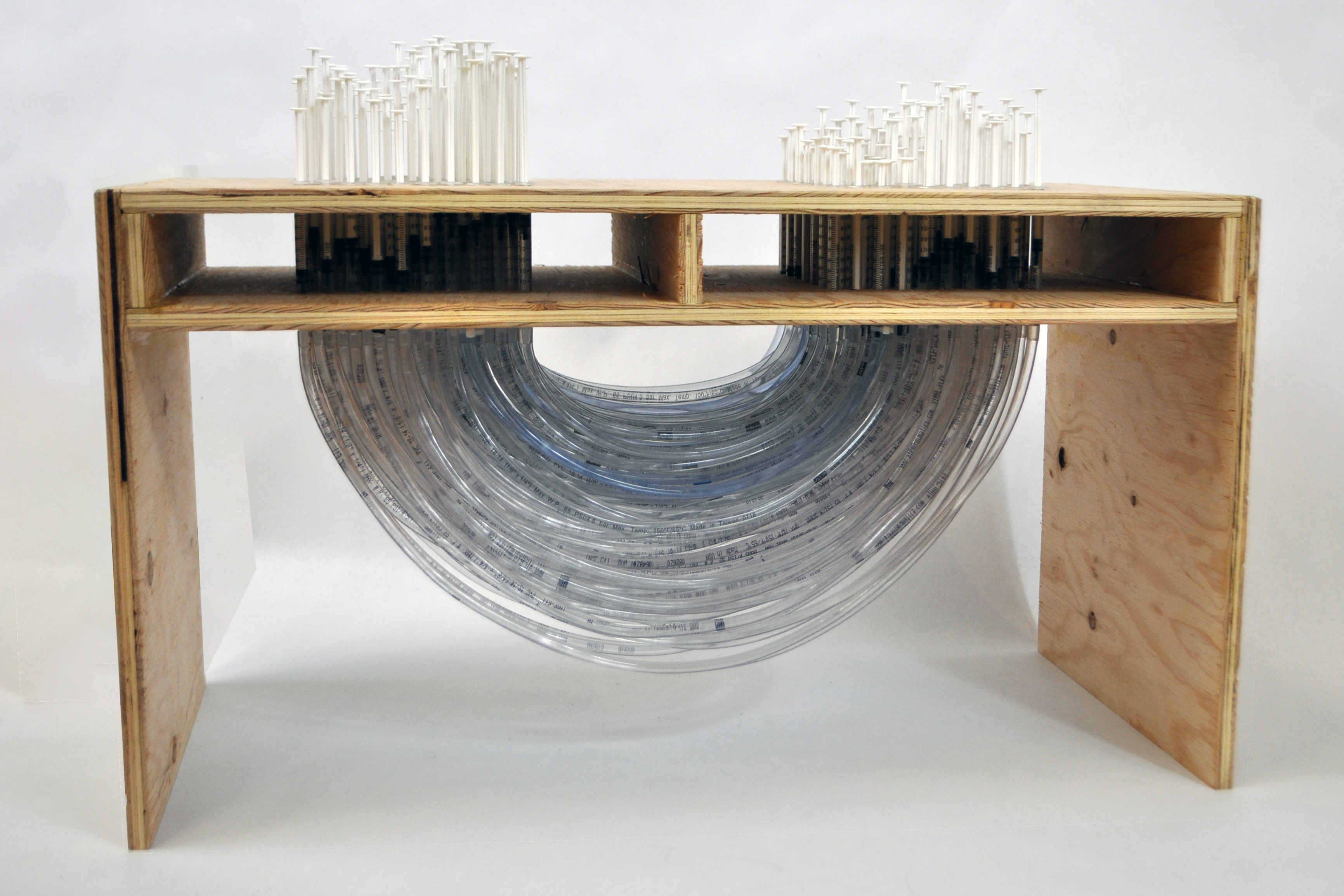
I created a hydraulic feels-like model that simulates the experience of touch across space. The model consists of a series of liquid syringes connected through vinyl tubes. The syringes are inlaid in a CNC plywood housing, creating two dense 6” x 6” polka dot grids of 260 syringes. I printed rubberized caps that press fit onto the syringe plungers. These caps created a little give, mimicking the feeling of skin.


I isolated the two polka dot grids by creating a partition through the middle of the model. This eliminated sightlines between the user testers, helping to simulate space.
Users tested the model with and without the rubber caps on the plungers. With the caps the model was described as feeling less life-like. The dampening effect of the caps decreased the feeling of individual pressure points, thus detracting from the overall experience.
The user experience was overwhelmingly positive. There were instances of participants applying simultaneous pressure (exchanging force) and turn taking (call and response). Users described the experience as being on the verge of human and inhuman, simultaneously feeling mechanical and organic. Two participants related the prototype to a typewriter. Multiple participants said they couldn’t stop smiling.
While the hydraulic version worked great to test the feeling, this system is limited by the length of its hose. Hoses can be run across a museum or field, but not across a country or ocean.
Arduino Study
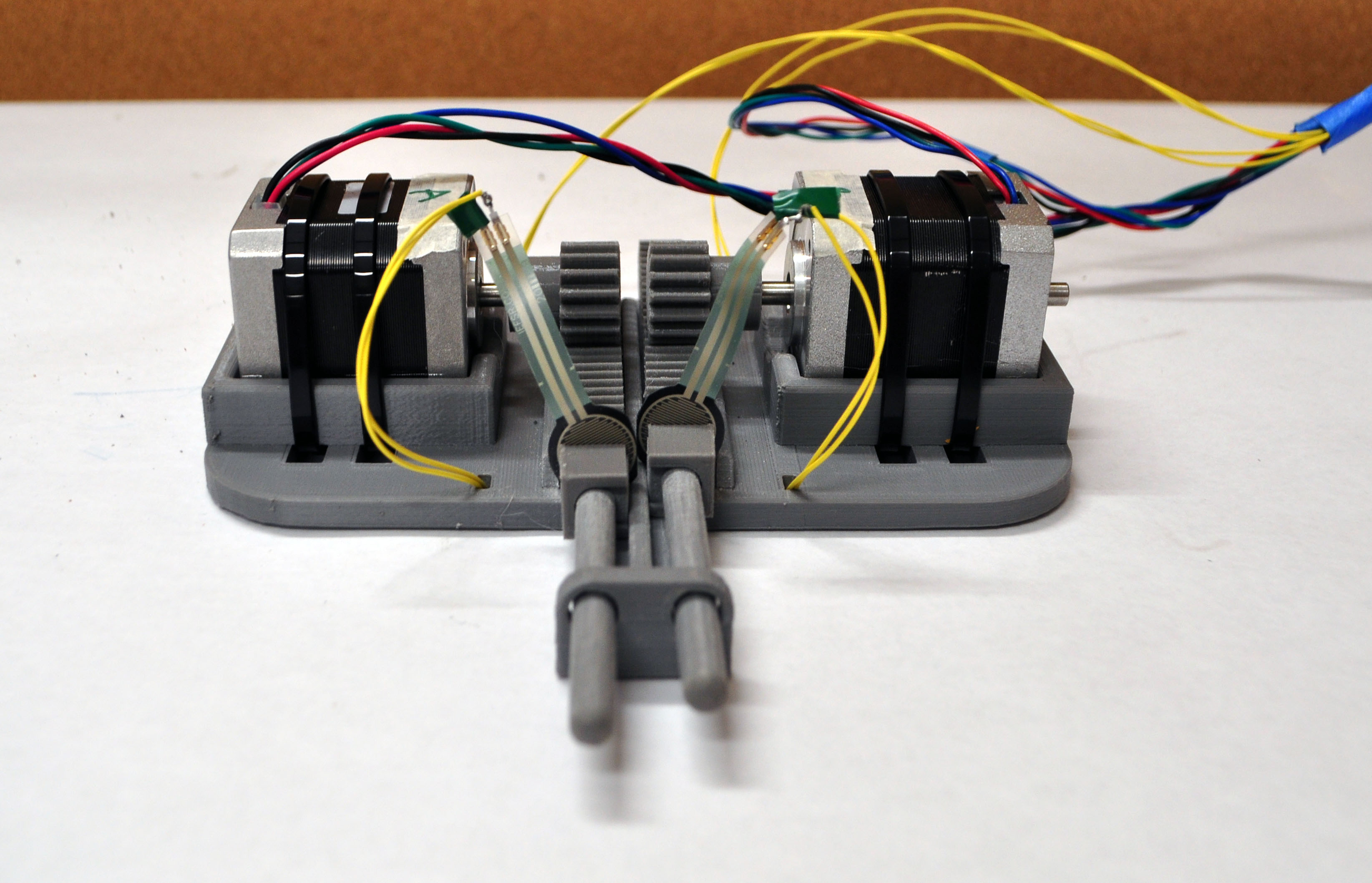
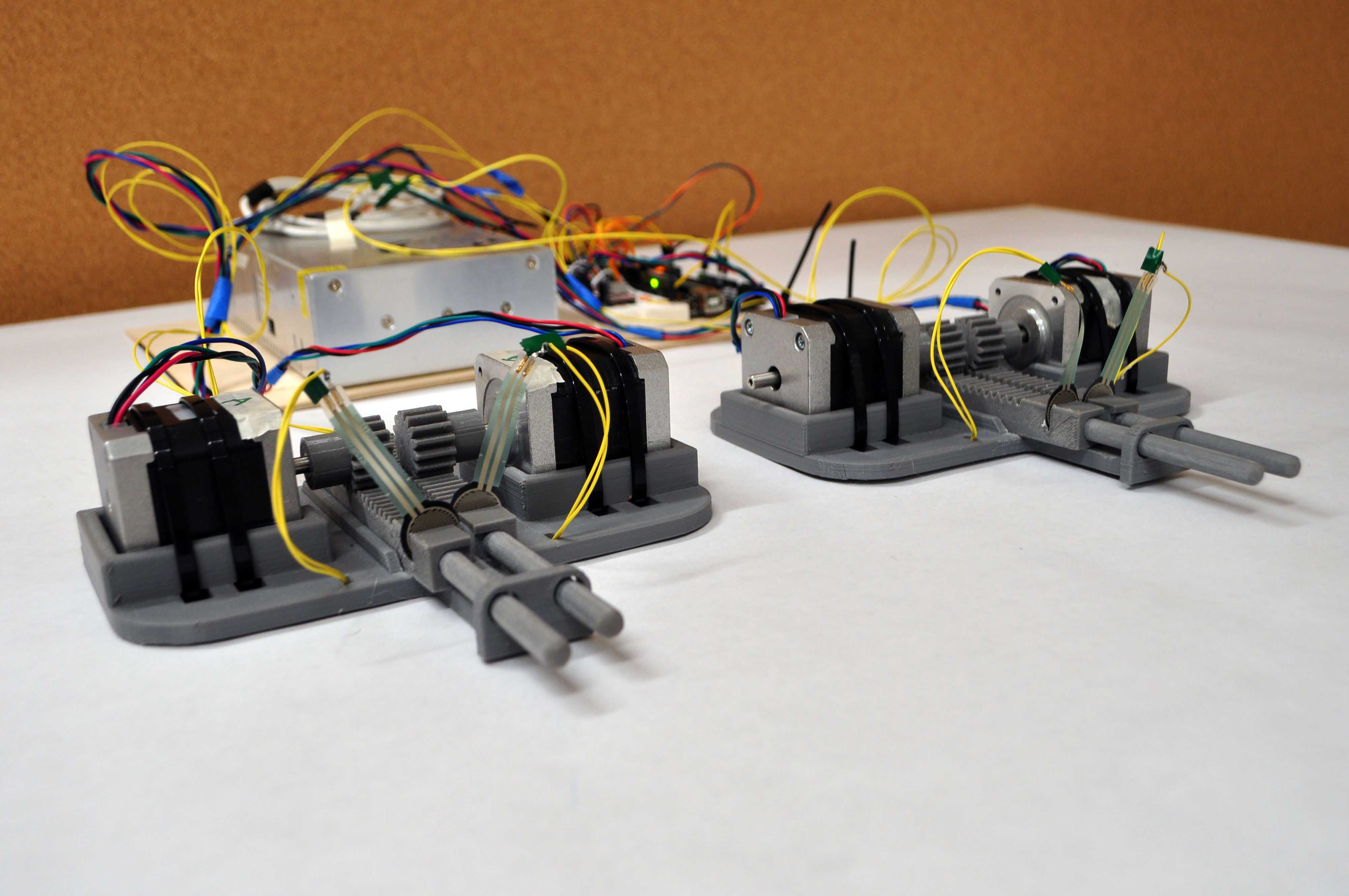
Next I turned my attention to creating an Arduino based prototype that can work across the internet. Mind you, I had no prior Arduino or coding experience. After researching different ways to accomplish my desired effect (hydraulics, pneumatics, and linear actuators) and consulting several mechanically minded friends, I settled on a system that uses FSRs (force sensitive resistors), stepper motors, and rack and pinion gears. I utilized a lot of open source resources for this study. In turn I published my 3D models and code on Thingiverse.
How the study works: When a person pushes on a rod it puts pressure on the FSR causing the stepper motors to drive that rod inwards and the opposing rod outwards. The speed and direction of the stepper motors are determined by the difference in force between the opposing FSRs. If both people are pushing on their rods, the rods directions are determined by who is exerting the most force.

Because I lack coding experience, to achieve this I built on existing open source code that uses a potentiometer to control the speed and direction of a stepper motor. After switching the input from the potentiometer to the difference of 2 FSRs. I smoothed (averaged) the resulting pot values over a length of time to make the motors less jerky.

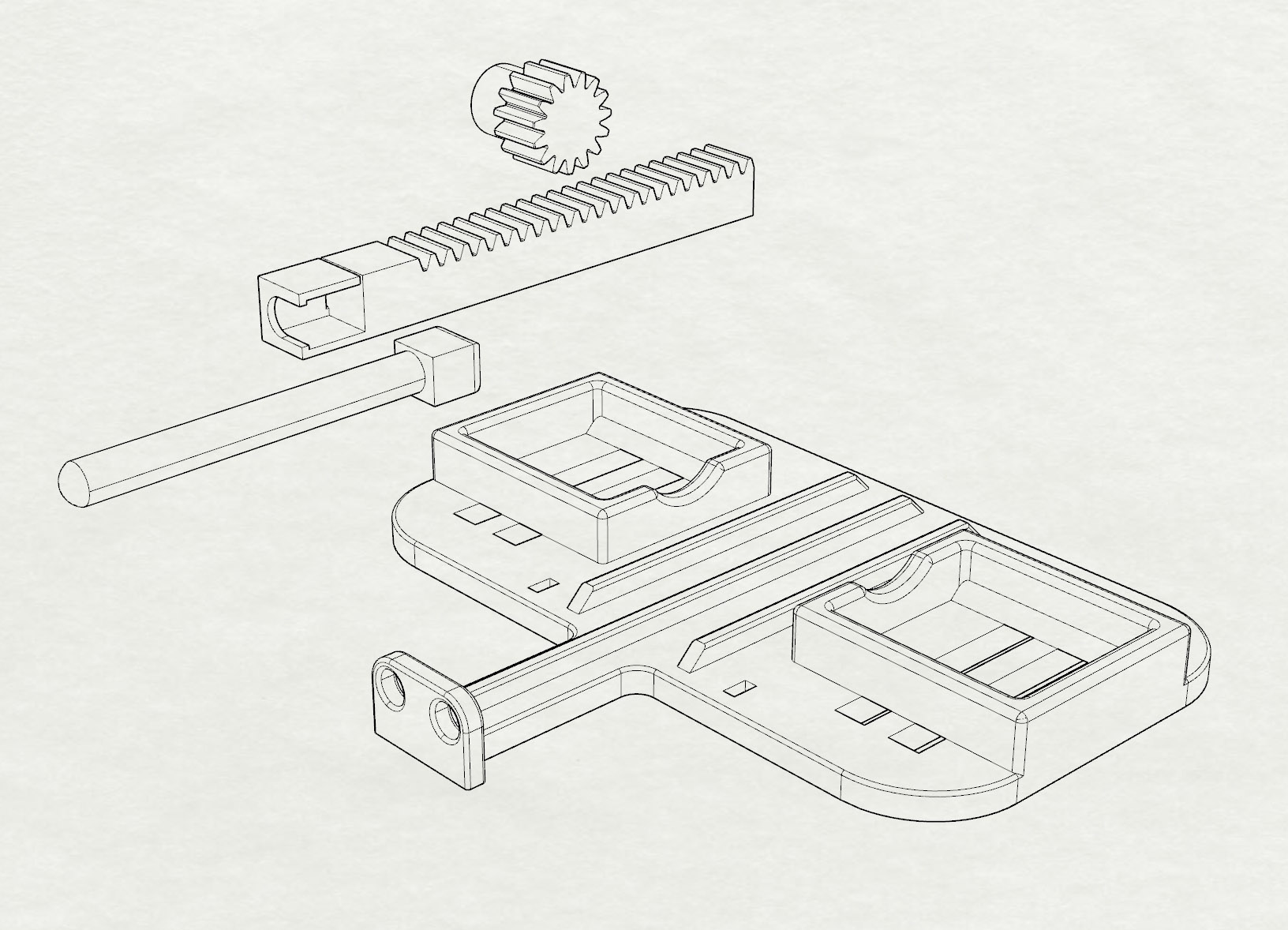
For the prototype I built off of existing rack and pinion 3D models downloaded from McMaster-Carr. I designed a rod that slots on to the rack and modified the pinion so that it press fits onto a stepper motor. I built a base that holds assembly together with just a few zip ties. All the parts are 3D printed out of PLA.
My next step is to make the system work across the internet. Another coding hurdle.